AEB,全称自动刹车系统,是如今绝大多数汽车标配的一项主动安全系统,它的职责,是在检测到前方有障碍物时,控制车辆刹停,避免可能的碰撞。
听起来是一项很靠谱的配置,对不对?但实际上,AEB也分三六九等,尤其是智能化程度越高的车型,AEB更安全。
举个例子,阿维塔11的AEB性能就非常好。那么同样是AEB,阿维塔11的AEB,和其他AEB有什么区别?

对比传统车型使用的AEB,阿维塔11的AEB触发时速更高,可在80km/h以内对障碍物进行识别和刹停。
而对比新势力车型使用的AEB,阿维塔11的障碍物识别能力又更高,能对各种异形障碍物做到有效识别。
换句话说,其它AEB看不懂、刹不住的场景,阿维塔11的AEB不仅能看得懂,更能刹得住。

究其原因,华为智能驾驶的加持,功不可没。
传统AEB所依附的感知硬件、算法与算力系统实在太过简陋,既做不到精准识别,也做不到准确判断,凡事全凭“肌肉反应”。
新势力AEB虽然融合了激光雷达、神经网络模型与大算力平台,弥补了传统AEB的遗憾,但对障碍物的特征识别又捉襟见肘。
这暴露出了当下新势力在BEV Transformer架构下的两点先天不足:
其一是BEV空间无法对障碍物的深度和高度进行表达。也就是说,类似高速路牌这样的物体,是无法被AEB准确识别的。
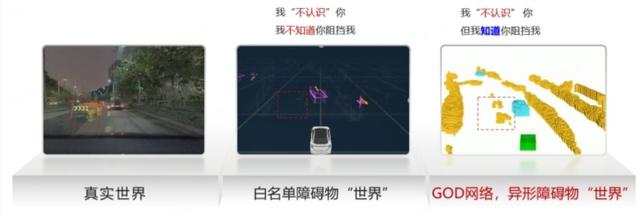
其二是Backbone的预训练效果,决定了障碍物能否被识别。AEB只能识别“白名单”里的物体,换其他物体就可能会失效。
道路上的异形障碍物千千万,想要依靠海量数据实现过拟合显然是不现实的,所以融合了Occupancy Network的华为GOD网络,就显得极其重要了。
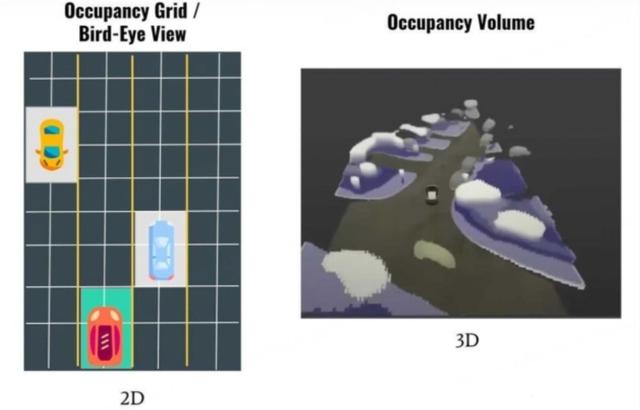
对比BEV,华为GOD网络有三点优势:
其一是表达空间从2D升维到了3D,更符合真实世界场景了。
其二是直接跳过目标检测“白名单”,所有感知到的物体,不论是什么种类、是动态还是静态,都会被展示在3D空间中。
其三是对障碍物的体积表达更加精准,GOD网络会用众多立体网格来表达障碍物,进而更准确地展示异形障碍物的体积与体型。
在华为GOD网络的帮助下,阿维塔11的AEB直接获得了质的飞跃,障碍物感知既迅速又准确,驾驶者与乘客的安全自然更也有保障了。
华为GOD网络,只是华为智能驾驶感知算法中的一部分,而利用GOD网络来提升AEB的安全性能,也只是阿维塔11智能驾驶的冰山一角。

花粉社群VIP加油站
关于作者

猜你喜欢