但即便一堆人在叫苦连天,还是有人能逆势翻盘。
其他人这会儿发愁的是如何多卖出几台车,他现在焦虑的是,手里订单太多,工厂产能咔咔拉满了,还是交付不过来。
不用多说,大伙儿都知道这位是谁吧?

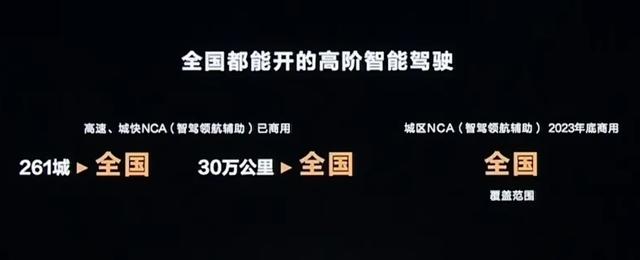
在问界新 M7 上,智驾的可用范围很广。前段时间,它用的这套华为 ADS 2.0 高阶智驾系统又升级了一波。
这次升级的核心,就是让全国所有高速、高架、快速路都能使用华为 NCA ( 和 NOA 一个意思 )功能。

脖子哥也实车试过了,就来说说我的感受。
我是在杭州开着问界新 M7 ,进行了 5 天的深度智驾体验。有白天,有夜晚,还有大雨 堵车的噩梦路况,总之除了下雪和下雹子,平常该有的路况都试着了。
NCA 差不多帮我开了 500 公里的路程,接管次数不超过 3 次。在绝大多数时间里,它都完成得不错,包括变道、超车、上下匝道,都能搞定。

比较舒服的一点是,它的变道很聪明:不会傻傻跟在慢车后面,但也不是一遇到慢车就立马要变道。整体驾驶风格接近一个温和派的人类司机。
然后在堵车的时候,仪表上会提示你可以把跟车距离调低,你只要调到最小的那一档,就可以激活拥堵跟车模式。
紧接着,车子会贴近前车,前车动它就立马跟上,不会留出很大的距离。
试了几次,这个跟车距离把控真的不错,反正我开下来都没有遇到被人插队的情况。

具体来说,他们用了 BEV 和自研的 GOD ( General Obstacle Detection,通用障碍物检测 )与 RCR ( Road Cognition & Reasoning,道路拓扑推理网络 )算法。
BEV 简单讲就是把多个摄像头的视觉信息合在一起,生成一个三维空间,这也是目前业内的通用算法。
而 GOD 和 RCR 就是华为独门秘籍了,也是奠定华为智驾的基础。
其中 GOD 负责识别各种物体。除了要认识人、车辆,还要能看明白锥桶、水马等常见物体,甚至连倒地的大树、掉落的纸箱这些也要会。
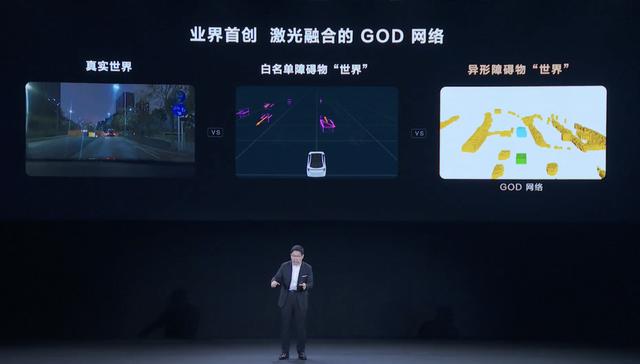
RCR 则是负责找路的。因为没了高精地图,车子要怎么走全靠自己认路。RCR 就是把导航地图和实际环境匹配在一起,做到 “ 看得懂路 ” 。
依靠这一套算法,华为智驾能实时感知道路信息,做到完全的无图智驾。
所以在高速 NCA 搞定之后,华为就加紧来搞城区 NCA 。按照规划,今年年底,华为将会实现全国所有城市的高阶智驾。
而问界新 M7 的另一大招牌,就是升级后的鸿蒙座舱。
华为作为一家手机厂,做出来的鸿蒙车机是个什么水平,大伙儿都有目共睹。流畅、丝滑就不说了,还有应用流转、超级桌面等互联功能,也都是它先搞出来的。
在问界新 M7 ,后排可以装有两个 Pad ,并且可以通过 MagLink 接口接入到座舱内。
这样车上每个人都有智能化的入口,而不是前排才有特权。

而且这个接口比较有意思,它有个儿童锁的设计,正常用手摁不进去,必须是磁吸口靠近之后,才可以推进去。

脖子哥很想看看,华为会再掏出什么新玩意儿来。

花粉社群VIP加油站
关于作者

猜你喜欢